pedestrian Movement simulation
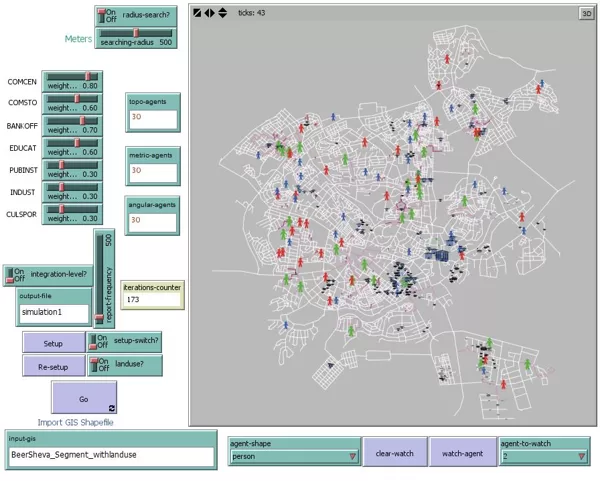
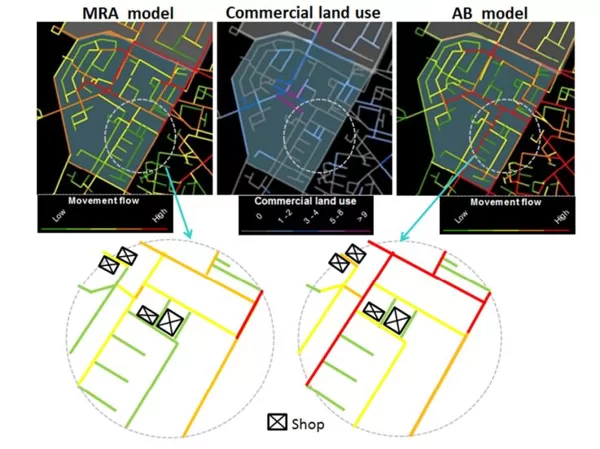
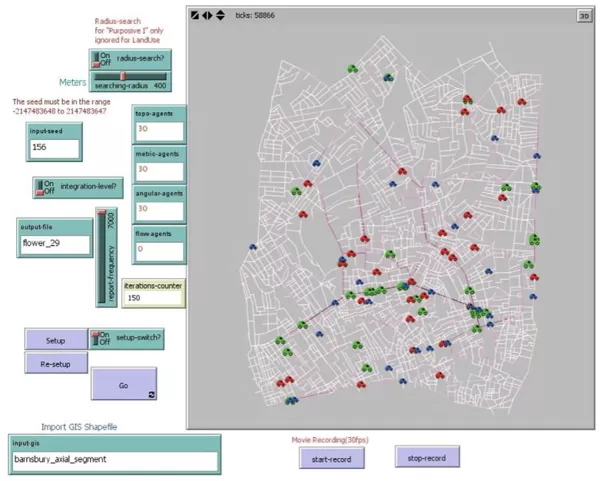
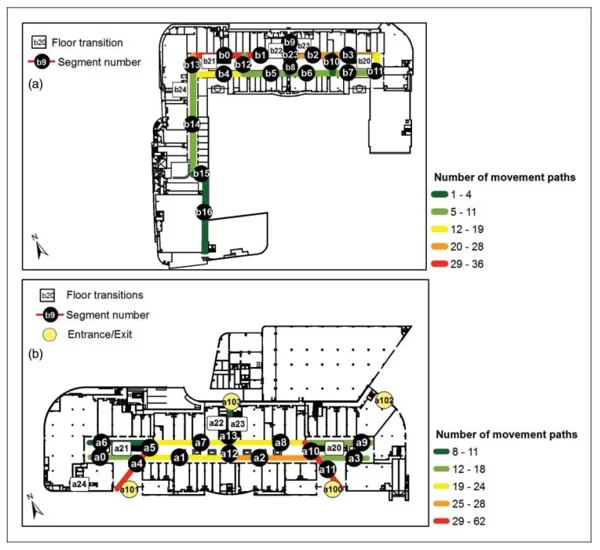
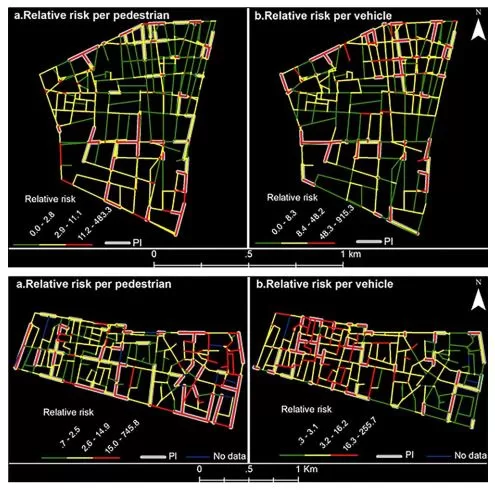
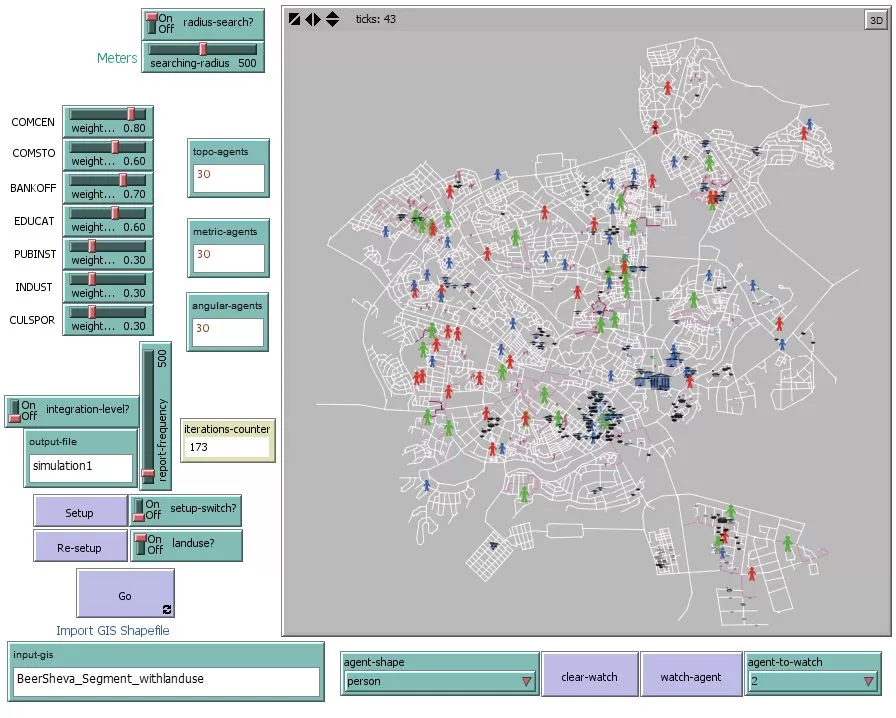
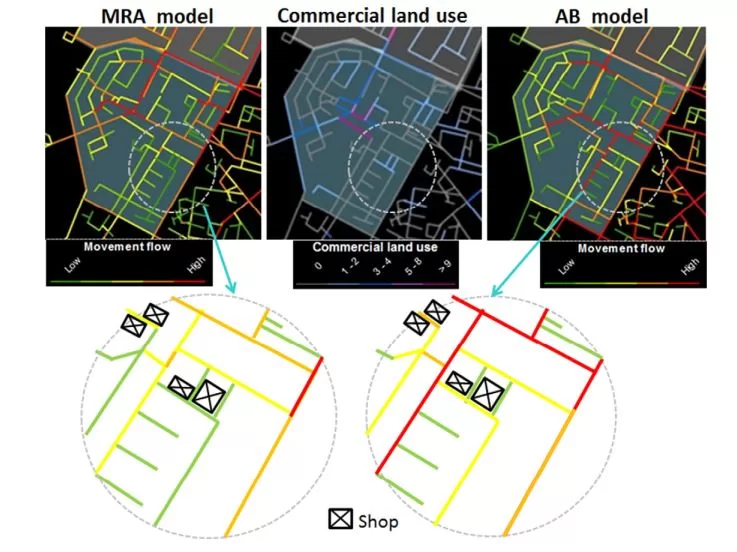
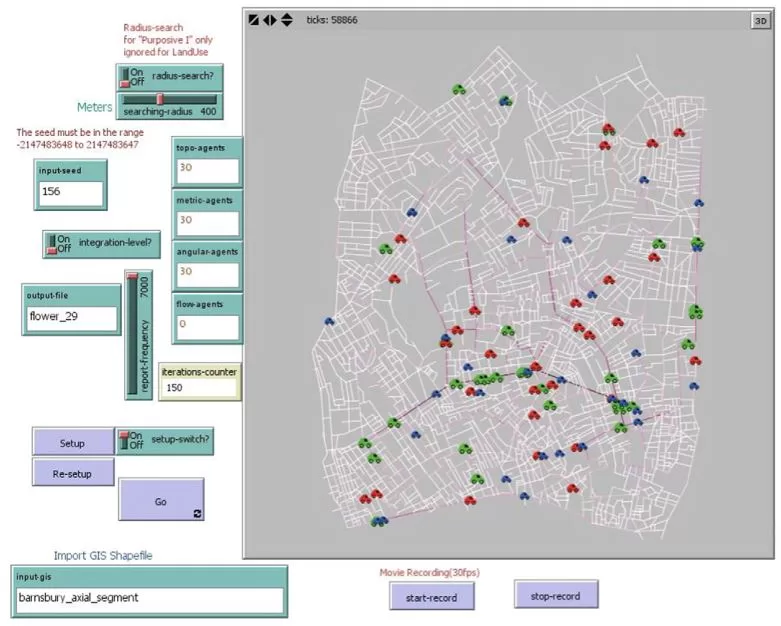
We developed an Agent Based Model (ABM) for simulating movement in urban environment. The model was constructed by transforming the various street network centrality measures and land-use variables used in space syntax modeling into agents' spatial behavior parameters. The advantage of our ABM lies in its ability to simulate the combined effect of the street network structure and land-use pattern on movement flows in urban street networks. Recently, we have developed ABM of pedestrian flow with GAMA platform. The agents in the model represent the residents of city and commuters to the city. The model is based on three data sets were prepared - urban environment characteristics, walking behavior and pedestrian volume observations. The models have been applied in cities in Israel and abroad to predict pedestrian flow in existing and planned urban environments.
Funded by: The Israeli Smart Transportation Research Center, 2024-2026
Funded by: Israel Innovation Authority, 2023-2025
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}